Vous allez analyser la structure du robot (sans le faire fonctionner). Les objectifs sont d'appréhender le vocabulaire des composants du mBot, la représentation fonctionnelle.
Le robot MBOT. Le robot MBOT. 1 - Les différentes pièces du robot MBOT. 2 - Disposition du mCore. 3 - Branchement des câbles ...
Compétences : CT 1.6 Analyser le fonctionnement et la structure d’un objet, identifier les entrées et sorties. CT 5.4 Piloter un système connecté localement ou à distance. CT 4.2.
Technologie Activité : Le robot Mbot : Système automatisé Nom : Prénom : Cl : 1/2 Compétence Maîtrise T2.2 Identifier le(s) matériau(x), les flux d’énergie et d’information.
Activité 1 : découvrir les entrées/sorties et les modes « connecté » et « autonome » de mBot. Activité 2 : Suivi de ligne et capteurs infra-rouges avec mBot. Activité 3 :.
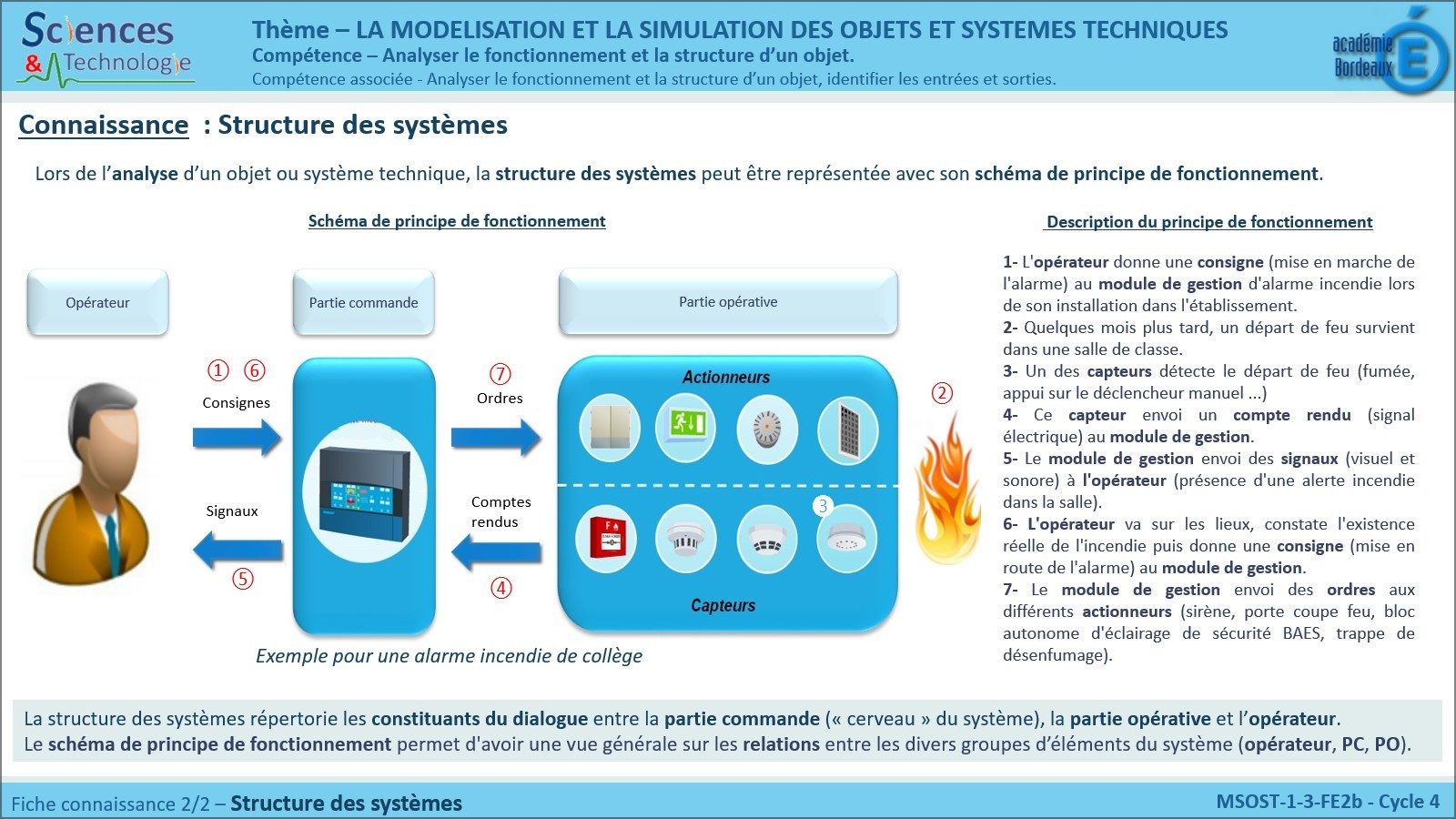
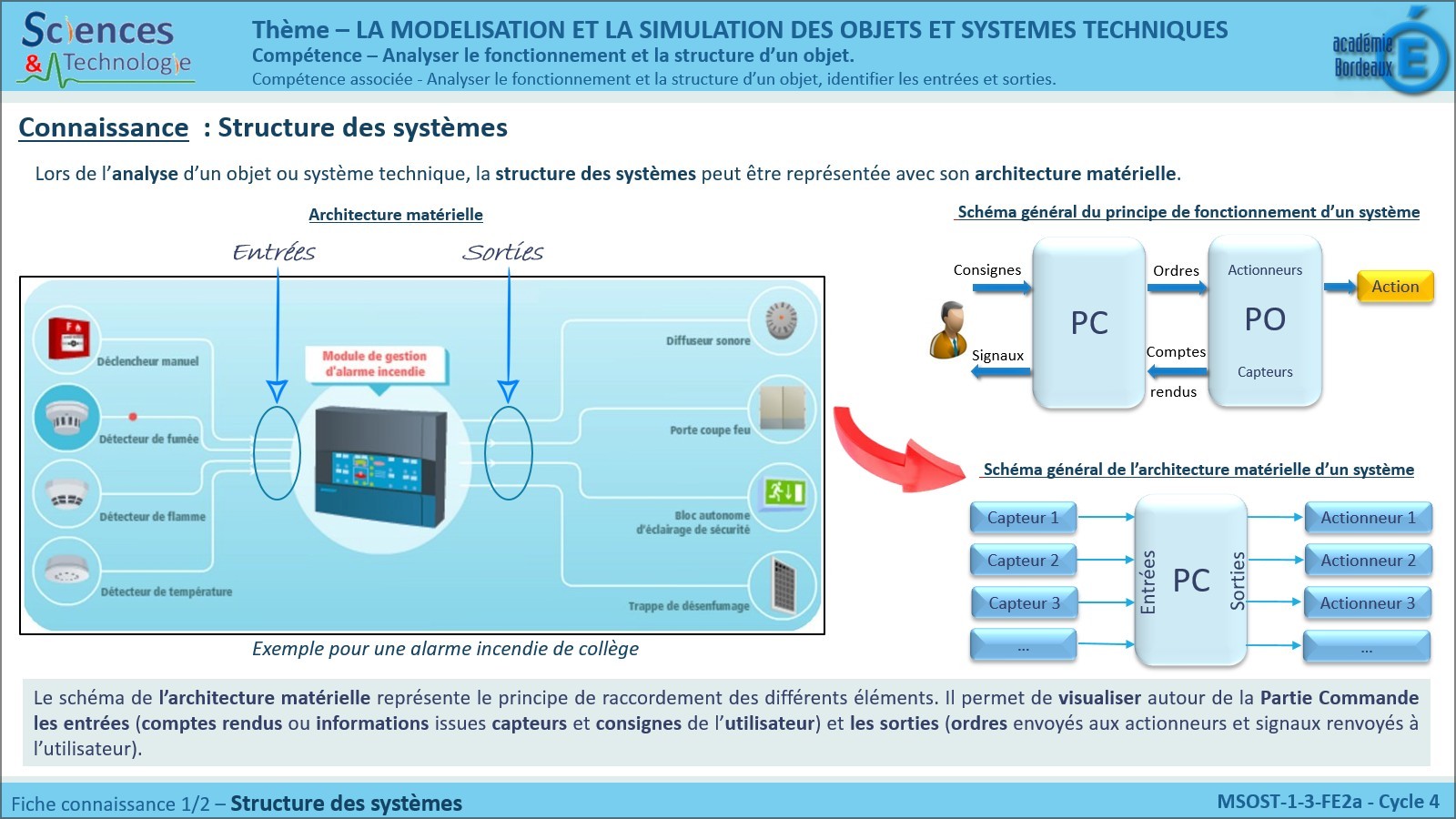
Le robot mBot est composée essentiellement : Entrées : capteur de lumière, bouton, récepteur infrarouge, capteur ultrasonique, suiveur de ligne. Sorties : avertisseur.
tutoriel robot mBot numéro 03, les capteurs et actionneurs (PDF de 945.4 ko) Ressource tutoriel robot mBot numéro 03, les capteurs et actionneurs. tutoriel.
Le robot se déplace en suivant un marquage au sol (ligne noire). Pour assurer cette fonction, il dispose à l'avant d'un module suiveur de ligne, composé de deux capteurs.